3D-UWB(Double Differential DuplexUWB)实时定位系统
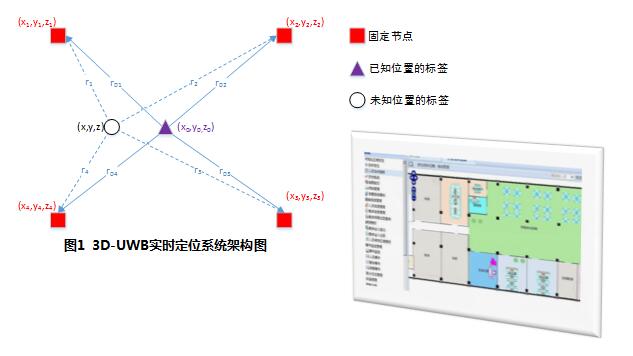
该系统源于广州紫英软件科技有限公司与清华珠三角研究院(无线宽带技术研发中心)多年的UWB研究积累,结合工业4.0的高精度无线定位应用需求开发,形成了双差分双工UWB实时定位理论和方法(如图1),开发出系列定位产品和解决方案。
3D_UWB实时定位系统主要面向国防领域、军工领域、金融领域、政府涉密领域等高安全性场所,对特定区域内所有动态、静态目标(包括人员、车辆、装备、重要物资、设施等),实现全区域全天候的可视化区域定位追踪和监控。通过建设在管理中心的可视化定位追踪监控平台,以布控区域矢量电子地图为基础,一体化实时主动式监控所有受控目标的位置、轨迹、状态、报警、以及对指定目标的实时视频跟踪,为高安全性需求场合提供了超乎以往的安全监管体验。
3D-UWB核心指标如下:
覆盖距离:单锚点100m以上,通过优化可到250m以上;
定位精度:通常情况下10cm,通过优化可提高至1cm;
容量:一般可支持300~2500次/秒,通过优化可达10000次/秒;
可支持多区域的连续扩展。
相比业界的其他定位技术,该系统具有如下优点:
无盲区:锚点优化布局,从几何构型上降低解算盲区的占比,有效提升了解算精度。
自同步:采用新型双差分解算方法,可以消除不同的标签、不同的锚点之间的差异影响,应用时锚点无需同步,降低架设同步难度;标签和锚点无需校准,实现随时接入随时使用,简化应用繁琐度,极大降低成本,提升用户体验。
容量大:采用高效调度管理方法,支持大容量标签,消除随机碰撞,提升整个定位系统的能力和效率。
覆盖大:从系统链路优化,包括天线设计、射频发送、接收灵敏度、基带速率及扩频比等的联合优化,可在保证可靠性的基础上大幅提高覆盖距离,进而大幅降低成本。
解算准:针对性解算病态矩阵,可以消除某些区域的定位坐标的跳变,提升定位的精度和一致性。
兼容好:提供共享数据通道,携带其他传感信息,精简通道数量,降低成本。
