室内导航与定位关乎国家安全,是全球大国竞争的核心利益。无人机最缺它!一旦无人机像人一样室内活动自如,将开启一个比现有规模还大的室内市场,对于室外环境,全球导航卫星系统(Global Navigation Satellite System, GNSS)诸如美国的全球定位系统(Global Positioning System, GPS)、我国的北斗卫星导航系统(BeiDou Navigation Satellite System, BDS)能够为用户提供较高精度的定位服务,基本满足了用户在室外场景中对基于位置服务的需求。然而,个人用户、服务机器人、扫地机器人等有大量的定位需求发生在室内场景。而室内场景受到建筑物的遮挡,GNSS信号快速衰减,甚至完全拒止,无法满足室内场景中导航定位的需要。因此,室内定位技术成为工业界与学术界研究的热点。
相比于美国军方于1964年正式投入使用的子午仪卫星定位系统(Transit)[1]以及后来以此为前身于1994年全面建成的GPS[2],室内定位技术起步较晚,美国联邦通信委员会(Federal Communications Commission, FCC)在1996年制定了初衷用于应急救援的E-911定位标准[3],之后在各行业应用需求的推动下,室内定位技术得到了快速的发展。目前,国内外研究已提出了射频识别技术(Radio Frequency Identification, RFID)、蓝牙、WLAN(Wireless Local Area Networks)、超宽带(Ultra-Wideband, UWB)等室内定位技术及系统,其中部分定位技术已经商用。但是,由于室内场景的复杂性和多样性,不同的室内定位技术也具有不同的缺点和局限性,尚未形成与GNSS类似的普适解决方案。
本文首先对目前主要的室内定位技术的原理进行简要介绍,然后对室内定位技术的分类进行阐述,并针对目前主流的室内定位技术进行详细介绍。最后介绍室内定位技术的应用场景和发展前景。
室内定位技术
室内定位是指在室内环境中实现位置定位,主要采用无线通信、基站定位、惯导定位等多种技术集成形成一套室内位置定位体系,从而实现人员、物体等在室内空间中的位置监控。
随着通信技术和电子制造工艺的不断发展和普及,室内定位技术层出不穷,定位精度从几米到几十米都有,并在一些行业中得到了应用。
01 室内定位方法
目前室内定位常用的定位方法,从原理上主要分为七种:邻近探测法、质心定位法、多边定位法、三角定位法、极点法、指纹定位法和航位推算法[4]。
ProximityDetection(邻近探测法)
邻近探测法,又称为CoO(Cell of Origin)法或Cell-ID(Cell Identification)法,通过一些有范围限制的物理信号的接收,从而判断移动设备是否出现在某一个发射点附近。该方法的定位精度取决于发射点的布设密度和信号覆盖范围。该方法虽然只能提供大概的定位信息,但其布设成本低、易于搭建,适合于一些对定位精度要求不高的应用,例如自动识别系统用于公司的员工签到。
Centroid Determination(质心定位法)
质心定位法是根据移动设备可接收信号范围内所有已知的信标(beacon)位置,计算其质心坐标作为移动设备的坐标。相应地,也可以根据接收信号强度指示(Received Signal Strength Indication, RSSI)设置对应的信标的权重,得到加权质心作为移动设备的坐标。该方法算法易于理解,计算量小,定位精度取决于信标的布设密度。
Multilateration(多边定位法)
该方法是通过测量待测目标到已知参考点之间的距离,从而确定待测目标的位置。基于多边定位的定位系统可以采用多种距离估计方法,比较常见的距离估计法有基于信号到达时间(Time Of Arrival, TOA),基于信号到达时间差(Time Difference Of Arrival, TDOA),基于增强观测时间差(Enhanced Observed Time Difference, E-OTD),基于往返时间(Round Trip Time, RTT),基于接收信号强度指示[5][6]。
Triangulation(多边定位法)
三角定位法,也可称为到达角测量法(Arrival Of Angle, AOA)。该方法是在获取待测目标相对两个已知参考点的角度后结合两参考点间的距离信息可以确定唯一的三角形,即可确定待测目标的位置。到达角信息,亦即信号到达的角度,可以通过定向天线获取。同时基于摄像头的定位系统也可实现基于AOA的定位[7]。
Polar Point Method(极点法)
极点法通过测量相对某一已知参考点的距离和角度从而确定待测点的位置。该方法仅需已知一个参考点的位置坐标,因此使用非常方便,已经在大地测量中得到广泛应用,多个待测目标的位置可以仅从一个全站仪的简单建立得到。
Fingerprinting(指纹定位法)
指纹定位采集的标准量是射频信号,但指纹定位法也可采用声音信号、光信号或其他无线信号实现。指纹定位通常包括两个阶段:第一阶段,离线校准阶段,通过实际采集或计算分析建立指纹地图。具体地,选择室内场景中的多个位置点采集多个基站发出的信号的强度并加入到指纹数据库中。第二阶段,定位阶段,通过将实际实时接收到的信号于指纹数据库中的信号特征参数进行对比找到最好的匹配参数,其对应的位置坐标即认为是待测目标的位置坐标。指纹定位的优势是几乎不需要参考测量点,定位精度相对较高,但缺点是前期离线建立指纹库的工作量巨大,同时很难自适应于环境变化较大的场景。
Dead Reckoning(航位推算法)
指纹定位采集的标准量是射频信号,但指纹定位法也可采用声音信号、光信号或其他无线信号实现。指纹定位通常包括两个阶段:第一阶段,离线校准阶段,通过实际采集或计算分析建立指纹地图。具体地,选择室内场景中的多个位置点采集多个基站发出的信号的强度并加入到指纹数据库中。第二阶段,定位阶段,通过将实际实时接收到的信号于指纹数据库中的信号特征参数进行对比找到最好的匹配参数,其对应的位置坐标即认为是待测目标的位置坐标。指纹定位的优势是几乎不需要参考测量点,定位精度相对较高,但缺点是前期离线建立指纹库的工作量巨大,同时很难自适应于环境变化较大的场景。
02 室内定位观测量
不同的室内定位方法选择不同的观测量,通过不同的观测量提取算法所需要的信息。下面对主要的观测量进行简要的介绍。
RSSI测量
RSSI测量是通过计算信号的传播损耗,可以使用理论或者经验模型来将传播损耗转化为距离,也可以用于指纹定位建立指纹库。
在自由空间中,距发射机d处的天线接收到的信号强度可由下式给出[4]:
其中,PT表示发射功率;PR表示距离d处的接收功率;GT表示发射天线的增益; GR表示接收天线的增益;λ表示信号波长;L表示系统的损失(L>1) 。
TOA测量
TOA方法主要测量信号在基站和移动台之间的单程传播时间或来回传播时间。前者要求基站与移动台间的时钟同步。
TOA测量的定位方法为多边定位。若电磁波从移动台到基站的传播时间为t,电磁波的传播速度为c,则移动台位于以该基站为圆心,c×t为半径的圆上。同理在第二个、第三个基站的圆上,故移动台的位置坐标应为这三个圆的交点。如图1所示,A、B、C为三个已知位置的基站,P为移动台,R1、R2、R3分别为移动台到基站A、B、C的距离。
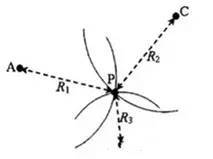
图1. 基于TOA的定位原理[9]
TDOA测量
该方法同样是测量信号到达时间,但使用到达时间差进行定位计算,可利用双曲线交点确定移动台位置,故可以避免对基站和移动台的精确同步。
通过TDOA测量,可以得到未知移动台到两个基站的距离之差,即移动台位于以两个基站为焦点的双曲线上。引入第三个基站,可以得到两个以上双曲线方程,则双曲线的交点即为移动台的位置。如图2所示,A、B、C为三个已知位置的基站,P为移动台,R1、R2、R3分别为移动台到基站A、B、C的距离,其中R2-R1、R3-R1为定值。
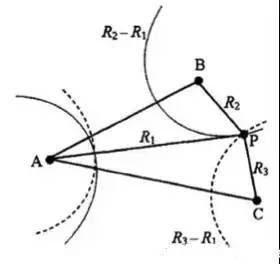
图2. 基于TDOA的定位原理[9]
AOA测量
AOA方法是指接收机通过天线阵列测出电磁波的入射角度,包括测量基站信号到移动台的角度或者移动台信号到达基站的角度。每种方式均会产生从基站到移动台的方向线。两个基站可以得到两条方向线,其交点即为移动台位置。因此,AOA方法只需要两个基站即可确定移动台位置。如图3所示,θ1为移动台P的信号到达基站A的角度,θ2为信号到达基站B的角度。
AOA需要准确测量电磁波的入射角,对天线的要求非常高,如果每个基站均安装天线阵列,将导致设备复杂度变高。而在室内环境中多径效应和环境变化均会严重影响方向判断,干扰定位结果。
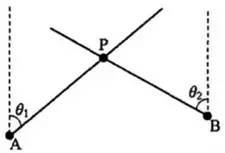
图3. 基于AOA的定位原理[9]
上一篇:嵌入式系统应用-巴西上空的蜻蜓
